

MomentUN propone sistema robotizado que clasifica las fresas y automatiza proceso de corte
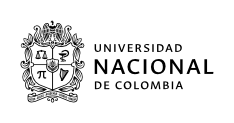
Los estudiantes del semillero MomentUN del curso de Robótica del Departamento de Ingeniería Mecánica y Mecatrónica: Jurgen Heinrich Krejci, Sebastián Realpe, Johan Ramírez y Alejandro Marín, desarrollaron un proyecto enfocado a brindar soluciones al agro colombiano poniendo en práctica conceptos que se aprenden en la materia de robótica; lo especial de esta clase, fue el reto que propuso el profesor y líder del semillero Pedro Cárdenas, agregando los elementos vistos el aula de clase a un prototipo de planta o pequeña celda clasificadora de frutas, reto que sin duda los estudiantes asumieron teniendo como resultado un proyecto innovador que les brindó mucha satisfacción.
«La filosofía del semillero es dar oportunidad a sus integrantes para aprovechar las herramientas y espacios que le brinda la universidad para desarrollar y complementar los proyectos iniciados en clase y brindarles acompañamiento para sacarlos adelante» complementa Jurgen líder del semillero.
La idea surge pensando en brindarle soluciones al sector agropecuario para reducir los costos de producción y automatizar los procesos mediante la creación de un sistema innovador para los medianos y grandes productores de fresas.
El sistema consiste en seleccionar de forma automática fresas de diferentes tamaños y hacerles un corte preparándolas para su producción, en este proyecto se complementa la dinámica y control de los robots vistos en clase, adicionándole elementos como fichas de lego, bandas transportadoras, cámara web y una serie de sensores para simular un movimiento real de una celda industrial real.
Mediante la técnica de visión de máquina (cámara web) que se utiliza para poder clasificar fresas, el computador analiza las imágenes captadas como lo haría una persona, pero aplicando algoritmos, luego el sistema se programa para determinar aspectos como el tamaño y el área donde se realiza el corte del cáliz (hoja de la fresa). Una vez procesada esta información la banda sigue corriendo y lleva la fruta para que pueda ser tomada por el robot, que la transporta hacia el área donde finalmente se le cortan las hojas.
Después de cortada la fresa, el robot la clasifica según su tamaño como pequeña, mediana o grande, poniéndola en cajas diferentes para cada denominación.
El montaje se realizó con fichas de lego, estas permiten mayor versatilidad a la hora de trabajar facilitando la manufactura de la planta. Gracias a la creatividad del grupo de integrantes se pudo complementar el prototipo de la planta con los demás elementos.
«La invitación a nuestros compañeros de primeros semestres, es dar más de lo que se nos pide y buscar más alternativas para el desarrollo de proyectos propuestos en clase» agregó el estudiante Sebastián Realpe integrante del semillero MomentUN.